OpenDRIVE
OpenDRIVE defines a file format for the precise description of road networks
If you’re familiar with traditional mapping tools (e.g. Google Maps, OpenStreetMap), you might notice that you don’t get much description beyond “there’s a road here”. But in driving simulators, we need much, much more information than that. That’s where OpenDRIVE helps us.
Initially developed through the PEGASUS project, OpenDRIVE was then transferred to ASAM, where its development continues.
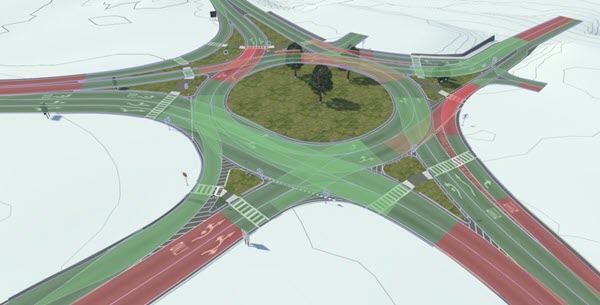
An OpenDRIVE file follows the XML standard and contains all relevant information describing a road network. This includes road geometries, marking, lanes, borders, etc. Any road network in the world can be described in the OpenDRIVE format.
Why do we need it?
So an OpenDRIVE file is an “HD map”. But why do we need that?
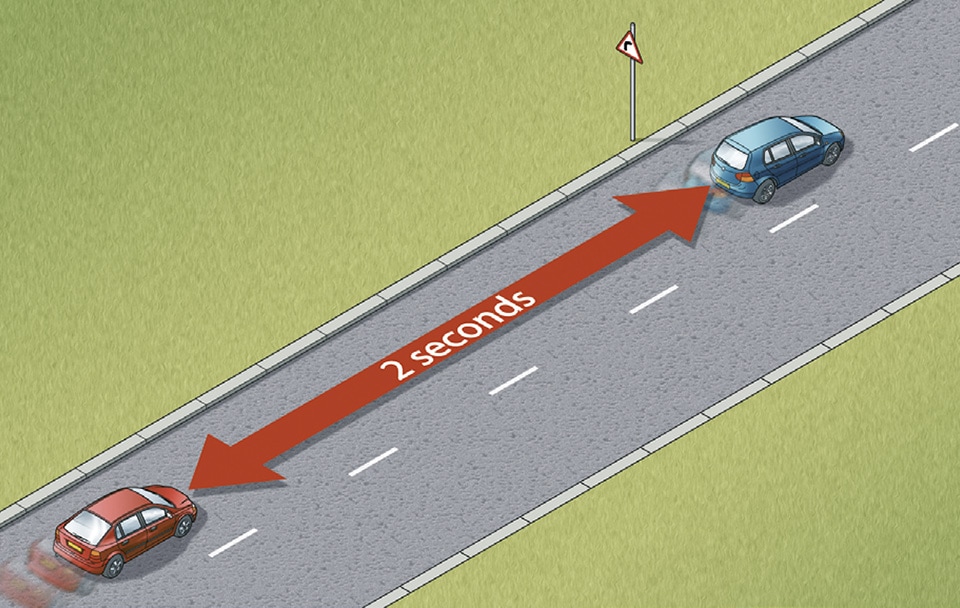
One answer lies in the reason why we use driving simulators: to run experiments. As such, we’re interested in data that will be generated when subjects are driving. Some of that data include
- Distance to another vehicle
- Time to collision
- Lane border distance
All of those values have one thing in common: they rely on the road geometry. If the road is perfectly uniform and straight, computing those is simple. However, roads are never uniform and straight, so we need to have access to the actual geometry of them to compute those values.
Another reason is scenario creation. When you’re building your experiment, you create some situations which involve other actors, such as cars or pedestrians. If your scenario involves following a lead car, you want to be able to simply set the lead car to “keep its lane”, without having to manually describe the curve it has to follow. Having access to the complete road description empowers the scenario designer to easily control any actor within the scene.
With such description at hand, we’ve been able to implement some major features of our platform, that we’ll detail later in this blog. Here are a few:
- A Virtual Driver, which can drive any car on any road network, while being controlled with high level goals, such has “keep your lane” or “turn left at the next intersection”
- Pedestrians that automatically walk around their block, to add some life to our scenes
- Automatic generation and positioning of traffic lights at intersections
How do we create it?
Now that we have a clear view of what we need OpenDRIVE for, how do we get our hands on such files?
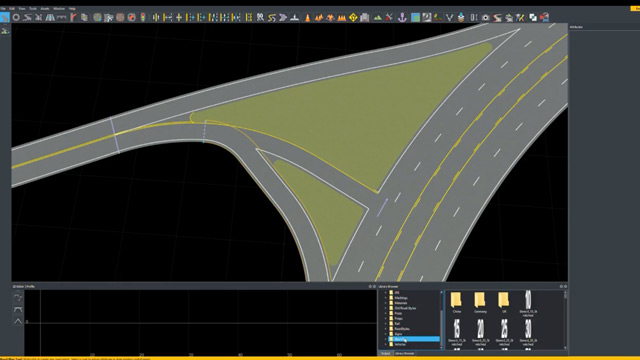
Our favorite tool is Mathwork’s RoadRunner (which, by the way, is bundled with their Campus licence). It’s a scene creation tool, which exports both the 3D part of the scene and its OpenDRIVE description. In the tool, you can either create a custom road network that’s tailored to your needs, or you can use the various GIS features within the tool to import real-world data. An extension is also available, called RoadRunner Scene Builder, which can automatically create scenes from HERE HD Maps. This certainly is the future for scene creation, but this service is quite expensive right now.
It’s also worth mentioning TrianGraphics, which has more or less the same feature set as RoadRunner, but seems less intuitive to work with.

Another really different approach is to scan real road sections, and generate OpenDRIVE for it. At least two companies specialize in that (Atlatec, 3D Mapping), but it’s not cheap, and you only get the OpenDRIVE, so no 3D scene to use in your simulator.
How do we read it?
There’s one thing left about OpenDRIVE: how do we actually read the file from our simulator? How do we parse it and extract data from it?
There are some libraries available online, that can manipulate OpenDRIVE files to some degrees. But in my experience, esmini has by far and large the best library in its RoadManager. It’s an active open-source project lead by Volvo, and the OpenDRIVE library has all the features you want, and I know firsthand that implementing some of those is definitely not an easy feat to accomplish. Through our extensive use of this library, we’ve found a few issues, and via collaborative work with the (amazing) maintainer, all of them are now fixed.
To conclude
Our driving simulation platform heavily relies on OpenDRIVE. By leveraging both RoadRunner and esmini, we’re able to easily create road networks and load/manipulate them into our simulator.
If you want to learn more about OpenDRIVE, you’ll find everything over at ASAM. The standard is still being worked on, especially via the OpenDRIVE Concept project, which hints at some future major changes in the way we describe road networks.